Intelligent Construction (ICON) Lab
At the Intelligent Construction Lab at Columbia (ICON@Columbia), we aim to understand how intelligent robots interact with human operators, co-workers, and the built environment. We leverage machine learning and control theory to design, build, and control these robots, and conduct human participant experiments to study their impacts on the end users.
The ICON lab is equipped with three high degree-of-freedom (DoF) robotic arms with various end effectors. The setup includes one Franka Emika Panda robotic arm and two xArm 7 robotic arms that offer versatile manipulation capabilities, supporting synchronized or independent actuation for complex experimental setups in smart environments and human-in-the-loop scenarios. The ICON lab also houses a Unitree B2 quadruped robot, which provides agile, all-terrain stable mobility and is equipped with a LiDAR scanner for high-resolution 3D reality capture and monitoring.


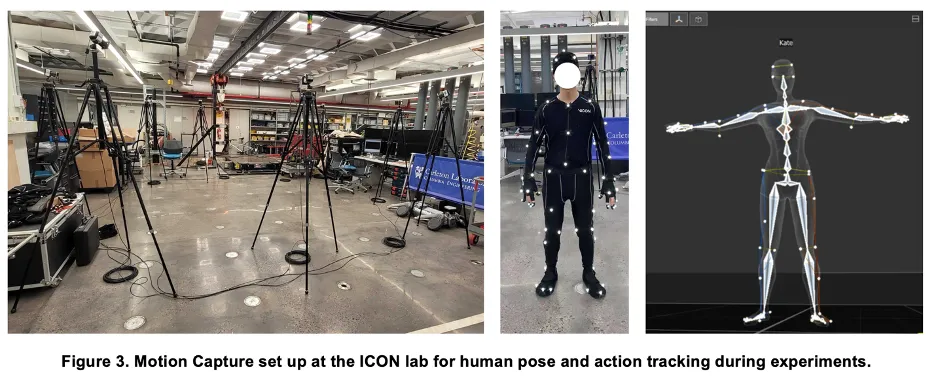
The ICON lab has a state-of-the-art motion capture space for human-robot interaction, featuring eight high-speed infrared cameras strategically positioned around the workspace. The setup supports real-time reconstruction of skeletal motion, making it ideal for applications such as ergonomics analysis, gesture recognition, and immersive VR/robotics experiments. The eight-camera configuration ensures robust coverage and high spatial accuracy, even during complex or dynamic activities.
For further information contact Zhengbo Zou.